Hello,
i am experiencing a bit of a problem using a drv8848 motor driver in my circuit.
The drv8848 is used in parallel mode for higher output capability.
Furthermore, it is wired up as indicated in the datasheet, so the 12V dc motor is attached to Pin 5 (BOUT2) and Pin 7 (BOUT1).
For C_VM a 10µF and parallel a 0.1µF capacitance are used.
for operation (3.3V is HIGH, VM is 12V sourced by a 12V battery):
BIN1 is set to LOW
BIN2 is set to HIGH
nSLEEP is set to HIGH
Result:
The motor does not start spinning. Sometimes a short damped sound can be heard from the motor as if it starts moving but then does not.
if i use a relatively small dc motor (such a motor that is used in toy race cars etc.) it works as expected. (one output rises to about 11V, the other stays at approx. 0V).
I also tried to exchange the C_VM capacitance from 10µF to 100µF or 1000µF but nothing changes.
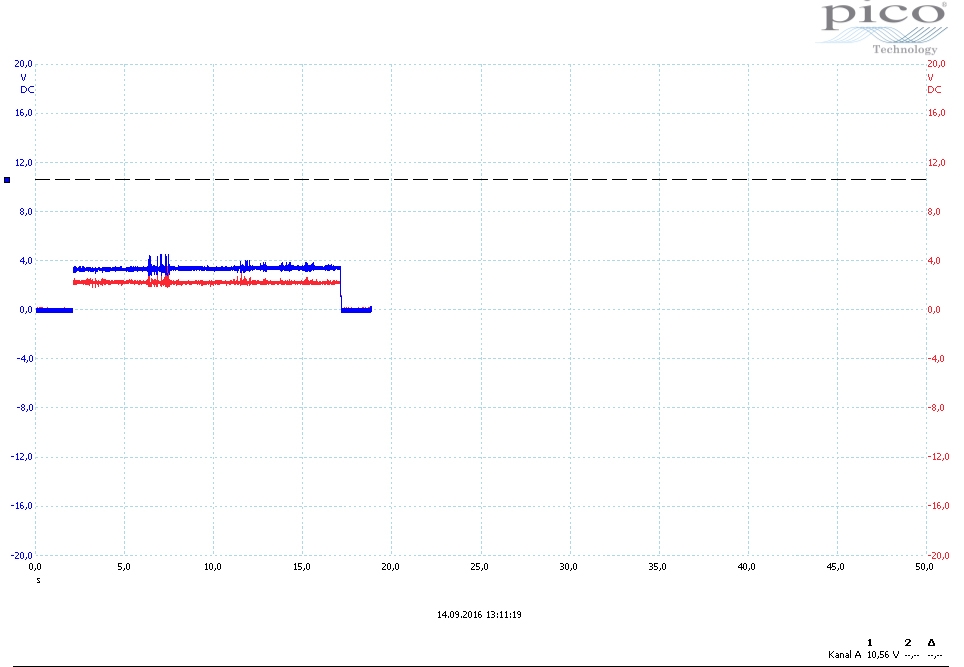
Please find attached a measurement of AOUT1|| BOUT1 and AOUT2||BOUT2 while driving the dc motor.
Do you have any hint where there might be a problem?
Is the DRV8848 driver generally suitable for spinning this dc motor (ELVI DC Brushed Motor diameter 59mm, 7W, 12V, with Hall-Sensor)?
Thank you very much!
Best Regards
Mathias